
Um robô móvel autônomo consiste em uma unidade robótica que pode-se locomover (tracionado por rodas) e detectar obstáculos frontais, laterais, no chão, etc. Hoje demonstraremos a parte 1 do desenvolvimento de um robô com motor shield, que é um robô móvel autônomo 4×4, somando os conhecimentos estudados até aqui com o Motor Shield L293D e o controle de servo motores.
Robô com motor shield: Lógica de funcionamento do
A lógica de funcionamento do Robô 4×4 é bem interessante, sendo o fluxograma explícito na Figura 1.

Figura 1 – Fluxograma da lógica de funcionamento do robô
É aconselhável que você dedique alguns minutos na análise do fluxograma, para compreender a lógica de funcionamento do Robô 4×4. Mas basicamente, efetuam-se as configurações iniciais do microcontrolador do Arduino (sistema embarcado utilizado no controle), então o robô move-se para frente a partir de uma velocidade determinada pelo usuário. No entretempo, a unidade lê a distância de um possível obstáculo frontal. Se a distância estiver ok, significa que não há obstáculos frontais e o robô pode continuar seguindo em frete.
Quando a distância for inferior a um limite que ainda será determinado, o robô para de mover-se para frente, então faz uma análise de sua posição atual. Primeiro lê a distância da esquerda e armazena em sua memória, depois lê a distância da direita e também armazena. Por fim, calculará qual distância é maior, para seguir o caminho por ela. Interessante não é mesmo?
O software completo, aplicando-se sensor ultrasônico e servo motor, será apresentado na segunda parte do artigo. Nesta parte 1, apresentaremos a plataforma com o Motor Shield, e efetuaremos o controle dos 4 motores, a partir de um teste no loop infinito.
O robô pode ser observado na Figura 2.

Figura 2 – Robô Móvel 4×4 Autônomo montado
Conexão do motor shield e parte mecânica
A mecânica consiste em um chassi para robótica de alumínio, com 4 motores, 4 caixas de redução e 4 rodas, proporcionando tração nas 4, a partir do controle feito pelo Motor Shield.
O hardware eletrônico do Arduino com Motor Shield, pode ser observado no diagrama esquemático do Figura 3.
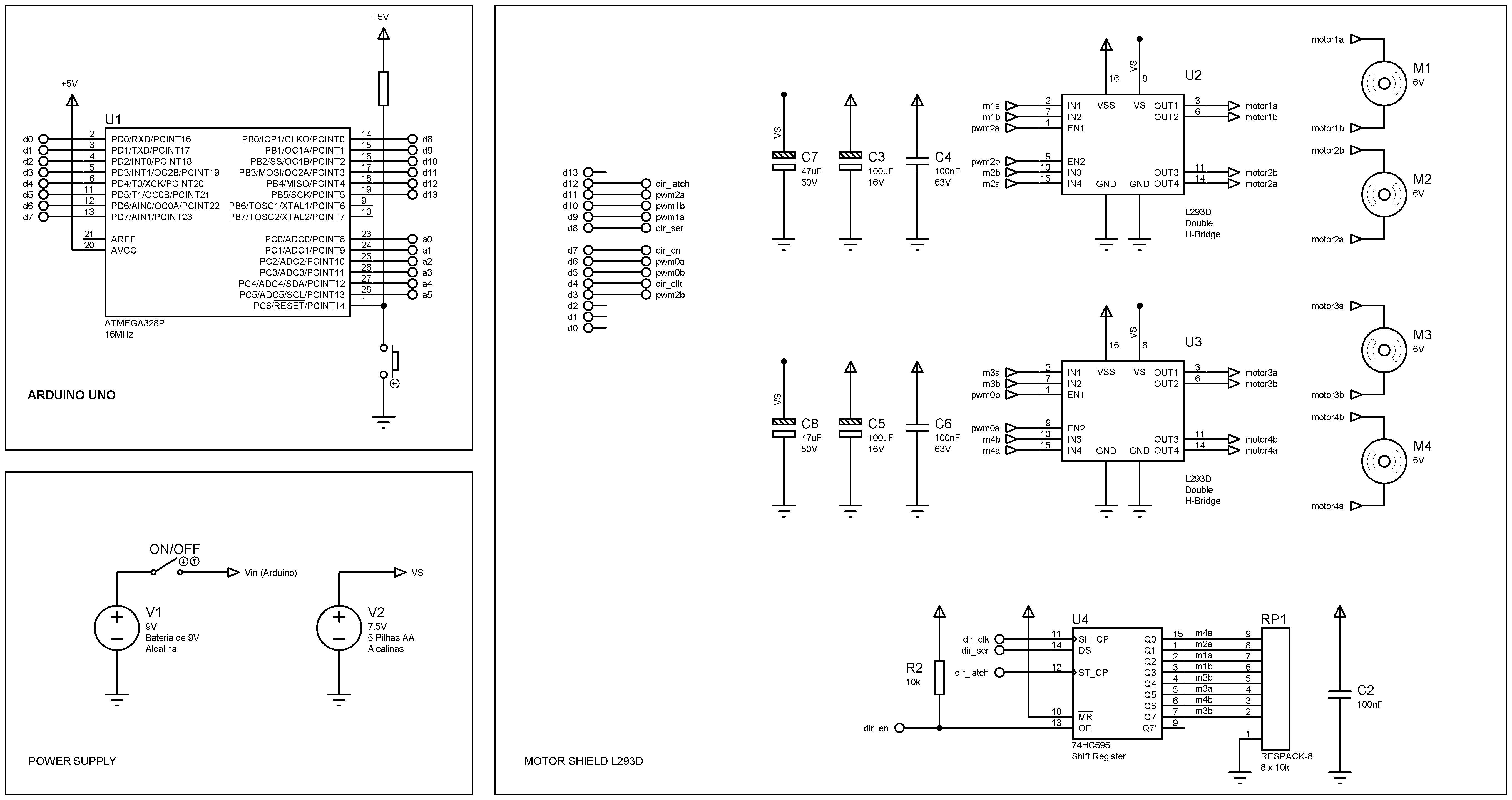
Figura 3 – Diagrama Esquemático parcial do Robô
Observe que ainda não foram incluídos o servo motor e o sensor ultrassônico, tópicos que serão abordados na segunda parte do projeto. O Motor Shield, como já visto, pode ser encaixado diretamente sobre o Arduino e as ligações estão indicadas em forma de labels no diagrama. Para alimentação dos circuitos lógicos, utilizou-se uma bateria alcalina de 9V e para alimentação dos motores, 5 pilhas alcalinas AA ligadas em série.
Programa robô com motor shield
Para teste de locomoção do robô, desenvolveu-se um software bem simples, porém interessante, pois pode-se observar como controlar 4 motores com Motor Shield L293D. No loop infinito, testamos as funções de movimentação do robô: frente, trás, direita, esquerda e parada.
/*
Aula 71 - Robô com Motor Shield - Parte 1
Autor: Eng. Wagner Rambo Data: Junho de 2016
*/
// --- Bibliotecas Auxiliares ---
#include <AFMotor.h> //Inclui biblioteca AF Motor
// --- Seleção dos Motores ---
AF_DCMotor motor1(1); //Seleção do Motor 1
AF_DCMotor motor2(2); //Seleção do Motor 2
AF_DCMotor motor3(3); //Seleção do Motor 3
AF_DCMotor motor4(4); //Seleção do Motor 4
// --- Mapeamento de Hardware ---
// --- Protótipo das Funções Auxiliares ---
void robot_forward(unsigned char v); //Função movimenta robô frente
void robot_backward(unsigned char v); //Função movimenta robô trás
void robot_left(unsigned char v); //Função movimenta robô esquerda
void robot_right(unsigned char v); //Função movimenta robô direita
void robot_stop(unsigned char v); //Função para para o robô
// --- Variáveis Globais ---
unsigned char velocidade = 0x00; //armazena velocidade motores (8 bits)
// --- Configurações Iniciais ---
void setup()
{
//A biblioteca configura as entradas e saídas pertinentes...
velocidade = 0xFF; //Inicia velocidade no valor máximo
} //end setup
// --- Loop Infinito ---
void loop()
{
robot_forward(velocidade);
delay(500);
robot_backward(velocidade);
delay(500);
robot_right(velocidade);
delay(500);
robot_left(velocidade);
delay(500);
robot_stop(velocidade);
delay(500);
} //end loop
// --- Desenvolvimento das Funções Auxiliares ---
void robot_forward(unsigned char v)
{
motor1.setSpeed(v);
motor1.run(FORWARD);
motor2.setSpeed(v);
motor2.run(FORWARD);
motor3.setSpeed(v);
motor3.run(FORWARD);
motor4.setSpeed(v);
motor4.run(FORWARD);
} //end robot forward
void robot_backward(unsigned char v)
{
motor1.setSpeed(v);
motor1.run(BACKWARD);
motor2.setSpeed(v);
motor2.run(BACKWARD);
motor3.setSpeed(v);
motor3.run(BACKWARD);
motor4.setSpeed(v);
motor4.run(BACKWARD);
} //end robot backward
void robot_left(unsigned char v)
{
motor1.setSpeed(v);
motor1.run(FORWARD);
motor2.setSpeed(v);
motor2.run(FORWARD);
motor3.setSpeed(v);
motor3.run(BACKWARD);
motor4.setSpeed(v);
motor4.run(BACKWARD);
} //end robot left
void robot_right(unsigned char v)
{
motor1.setSpeed(v);
motor1.run(BACKWARD);
motor2.setSpeed(v);
motor2.run(BACKWARD);
motor3.setSpeed(v);
motor3.run(FORWARD);
motor4.setSpeed(v);
motor4.run(FORWARD);
} //end robot right
void robot_stop(unsigned char v)
{
motor1.setSpeed(v);
motor1.run(RELEASE);
motor2.setSpeed(v);
motor2.run(RELEASE);
motor3.setSpeed(v);
motor3.run(RELEASE);
motor4.setSpeed(v);
motor4.run(RELEASE);
} //end robot stop
Para mais detalhes, acesse o vídeo disponível no início deste post, e para download dos arquivos utilizados aqui acesse este link.

Gostou? Deixe seu comentário logo abaixo.
olá, tem como usar essa base 4WD pra controlar via bluetooth?
Olá Erisson.
Sim, é possível, porém teria que adaptar o sistema para comunicar com um módulo HC-05 ou uma placa que possua comunicação bluetooth.
Além disso, será necessário efetuar as alterações necessárias no código para que o comando seja via celular ou outro dispositivo bluetooth.
Att.
Vitor Mattos.
Suporte Técnico MakerHero.
Como posso comprar a lista de materiais completa desse projeto?
Vem um pdf ou manual de passo a passo?
Qual kit Arduino comprar para fazer este robô motorshield ? Onde comprar o chassi?
Olá, na ultima foto é possível ver um chassi transparente e os 4 motores. Uma coisa que de meu curiosidade é que esse motor tem um eixo passante. De um lado do eixo está a roda e do outro lado há um disco preto. O que seria esse disco preto? Seria um encoder? Na MakerHero há algum encoder que possa se encaixado no eixo desse motor para fazer o controle de velocidade ou trabalhar com odometria?
lança a segunda parte